Projects from the Udacity Robotics Software Engineer Nanodegree (2017), a two-term program covering perception, localization, path planning, control, computer vision, and deep learning for robotics through ROS.
[Read More]
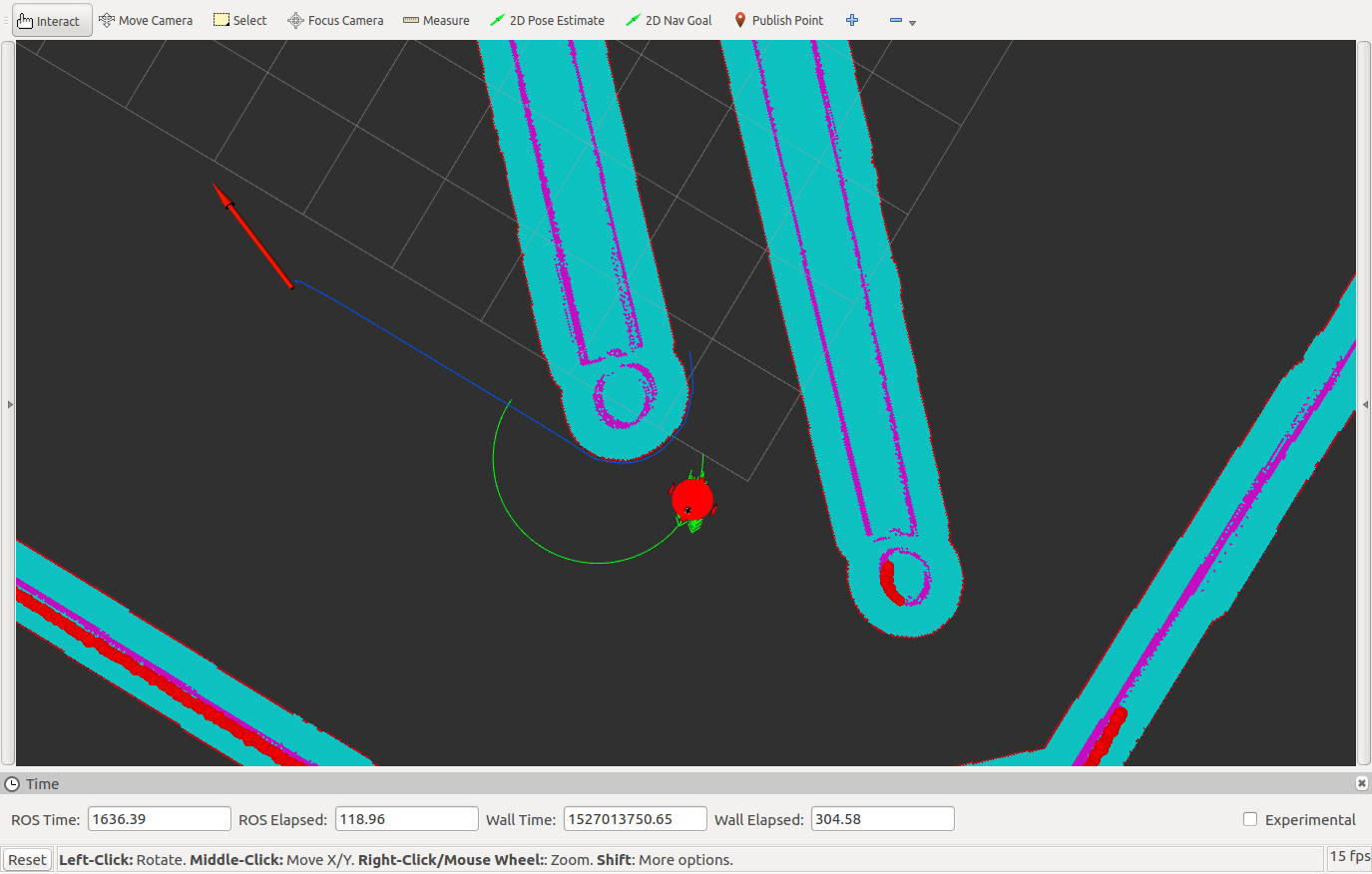
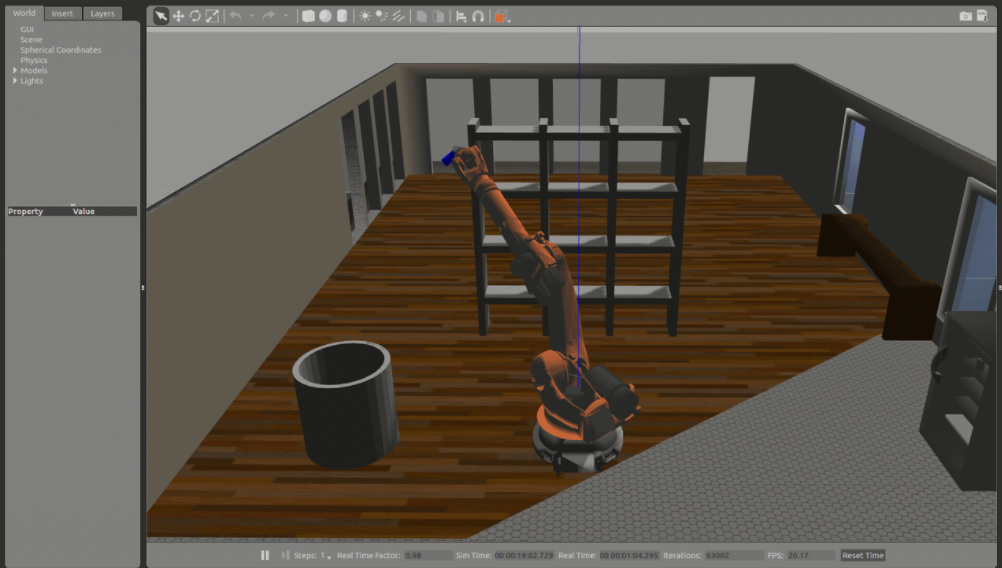
Applied SLAM to enable a robot to build a map and localize itself simultaneously in a kitchen environment. The robot is equipped with a 2D LiDAR and RGB-D camera, simulated in Gazebo and RViz using the RTAB-Map ROS package.
[Read More]
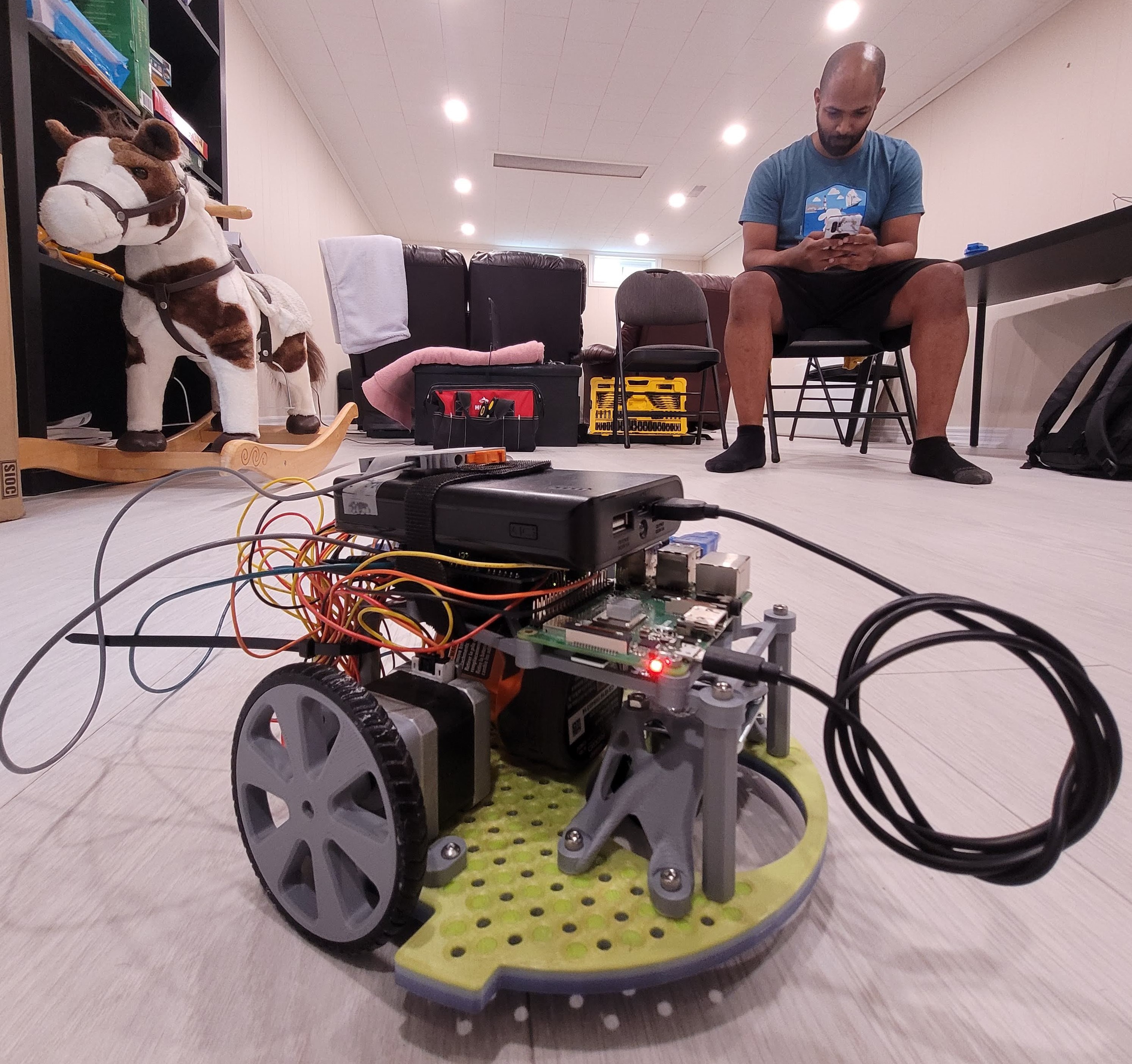
Two robot configurations tested against each other for localization and path planning in a known map using ROS and Gazebo. The circular robot is a custom design; the rectangular model is provided by Udacity.
[Read More]
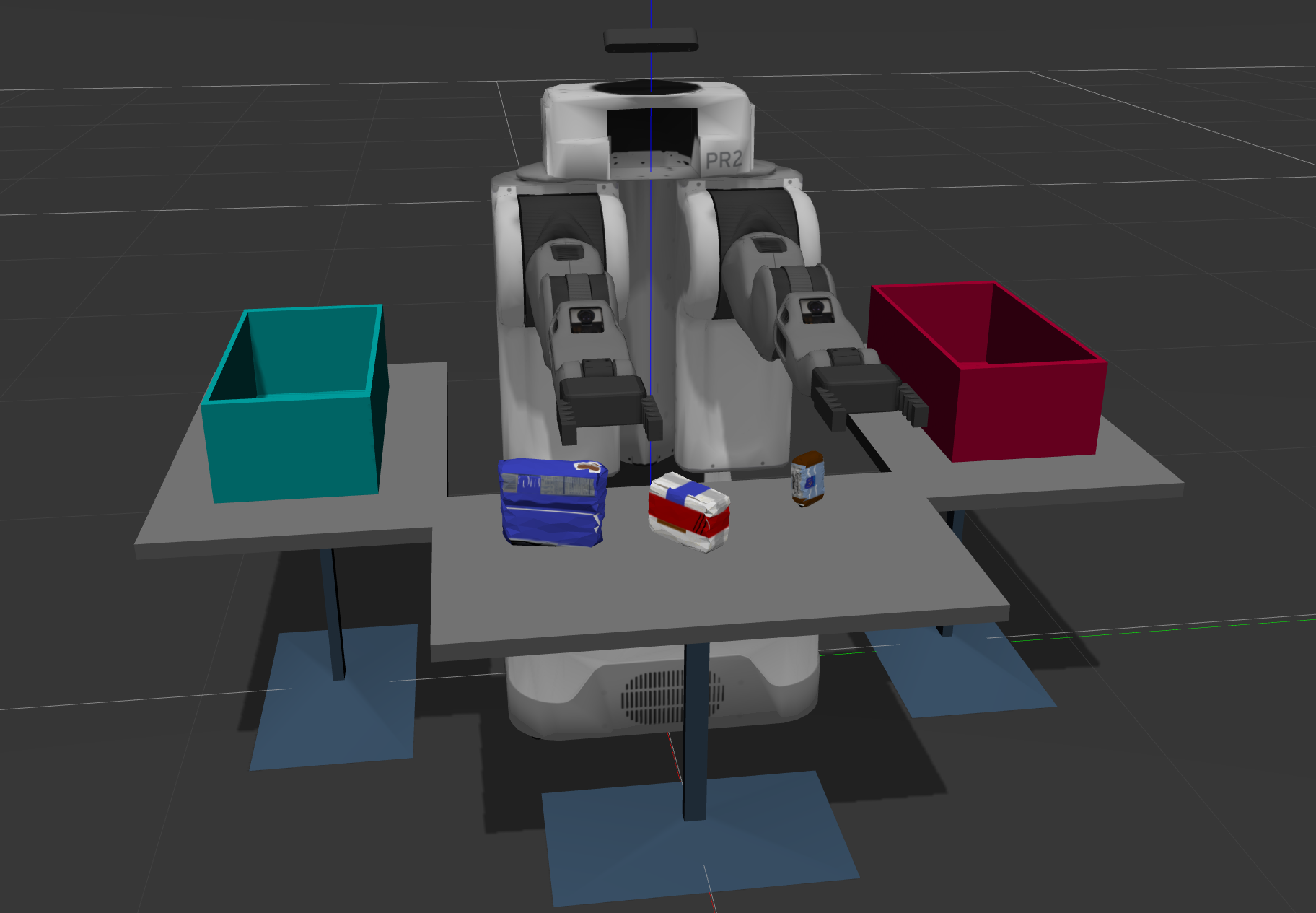
Perception pipeline for a PR2 robot using an RGB-D camera: filter raw point cloud data, segment objects, and classify them using a trained SVM model.
[Read More]
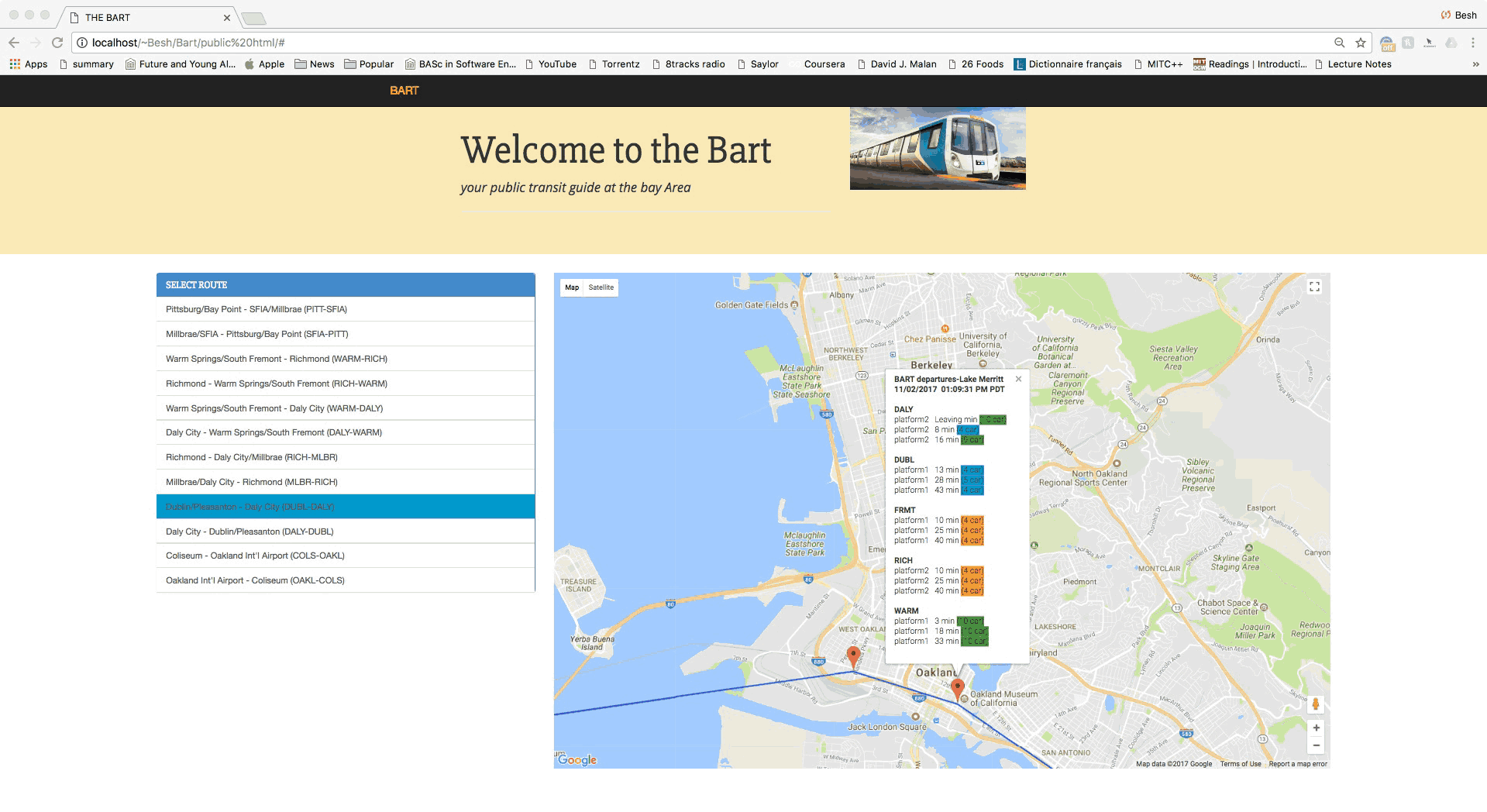
A mashup web app providing an interactive guide to BART (Bay Area Rapid Transit) routes, built as part of an audited Harvard course — Building Dynamic Websites by David J. Malan.
[Read More]
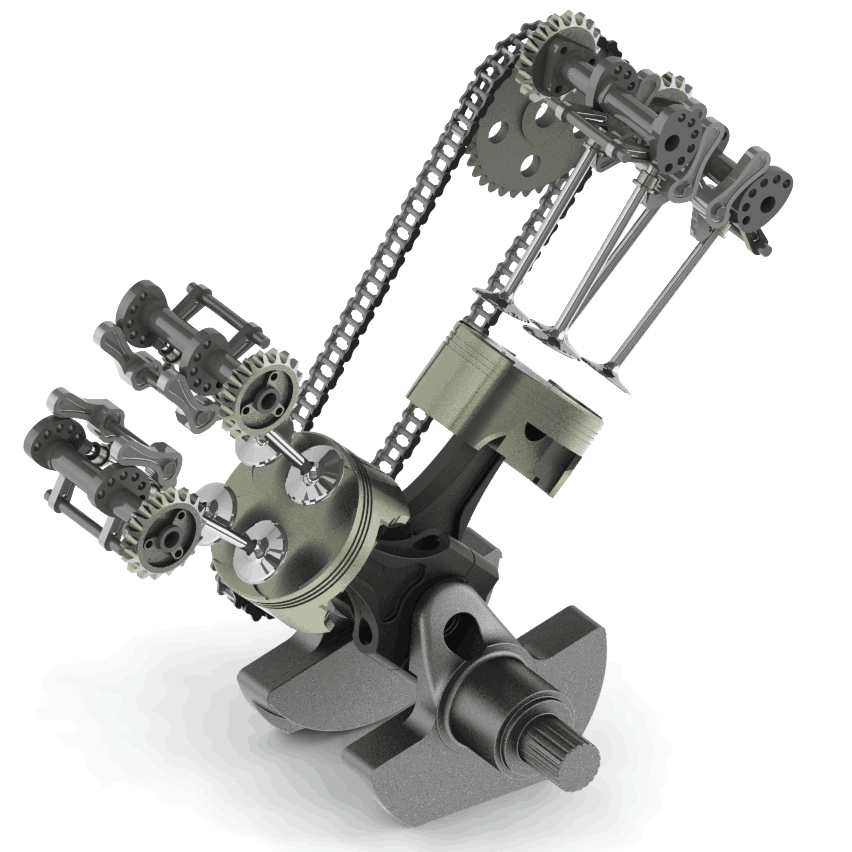
Mechanical engineering final project modeling the internal components of a motorcycle V-engine in SolidWorks. Components modeled include the flywheel, connecting rods, valves, pistons, and sprockets.
[Read More]
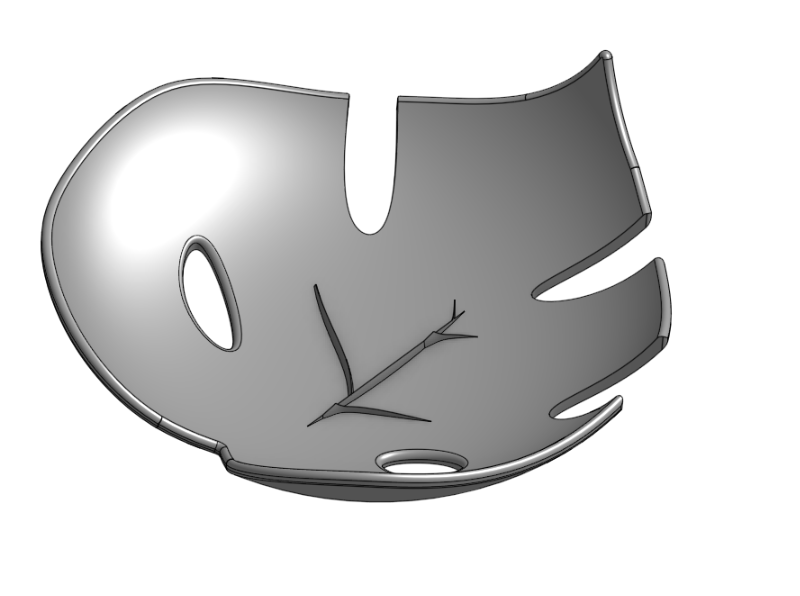
University project focused on mechanical product design, prototyping, and testing. The goal was to design a sturdy, affordable, phone-compatible microscope base for PDMS lenses.
[Read More]
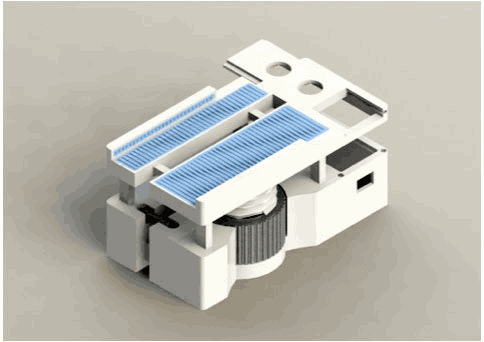
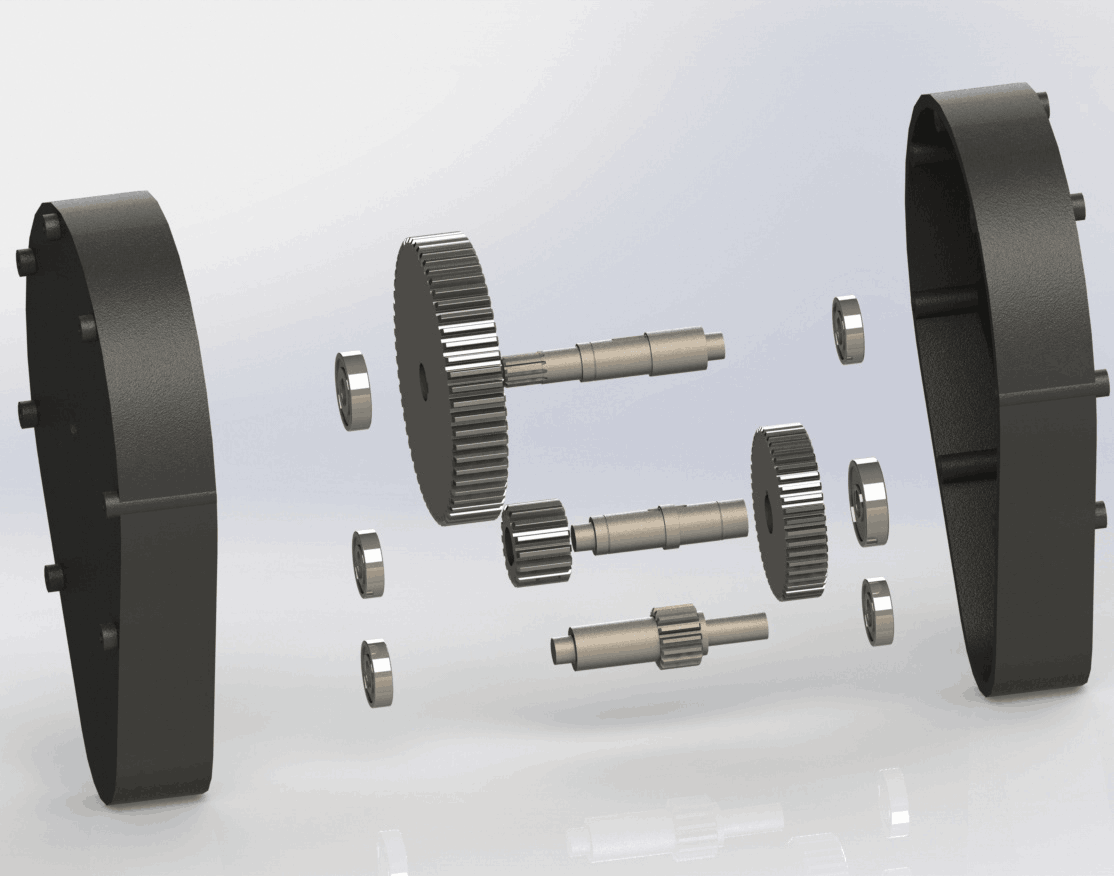
University of Ottawa Machine Design course project. The goal was to design a gear train for a cement mixer, significantly reducing output speed while amplifying torque, using only components available in existing catalogues.
[Read More]