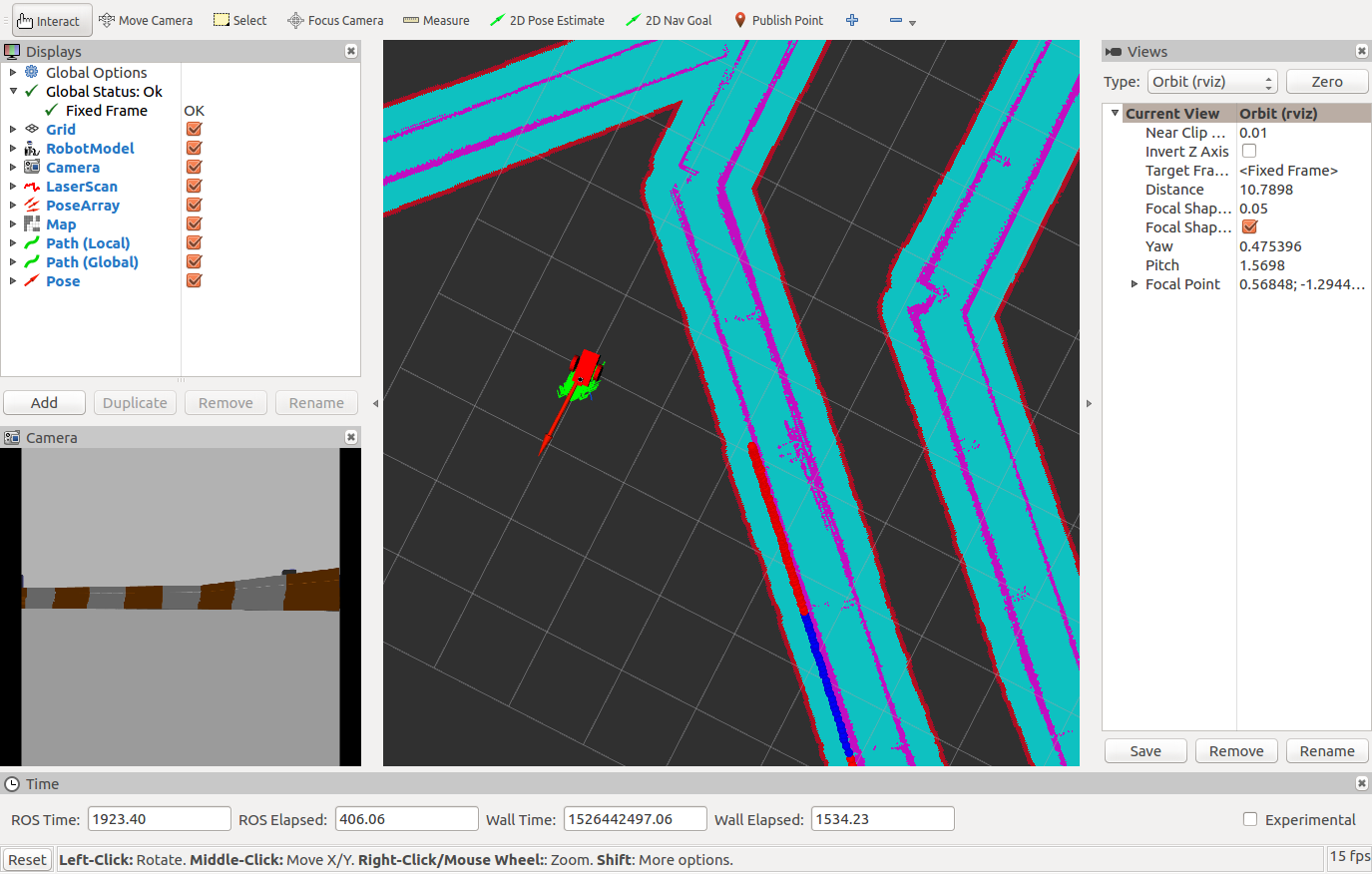
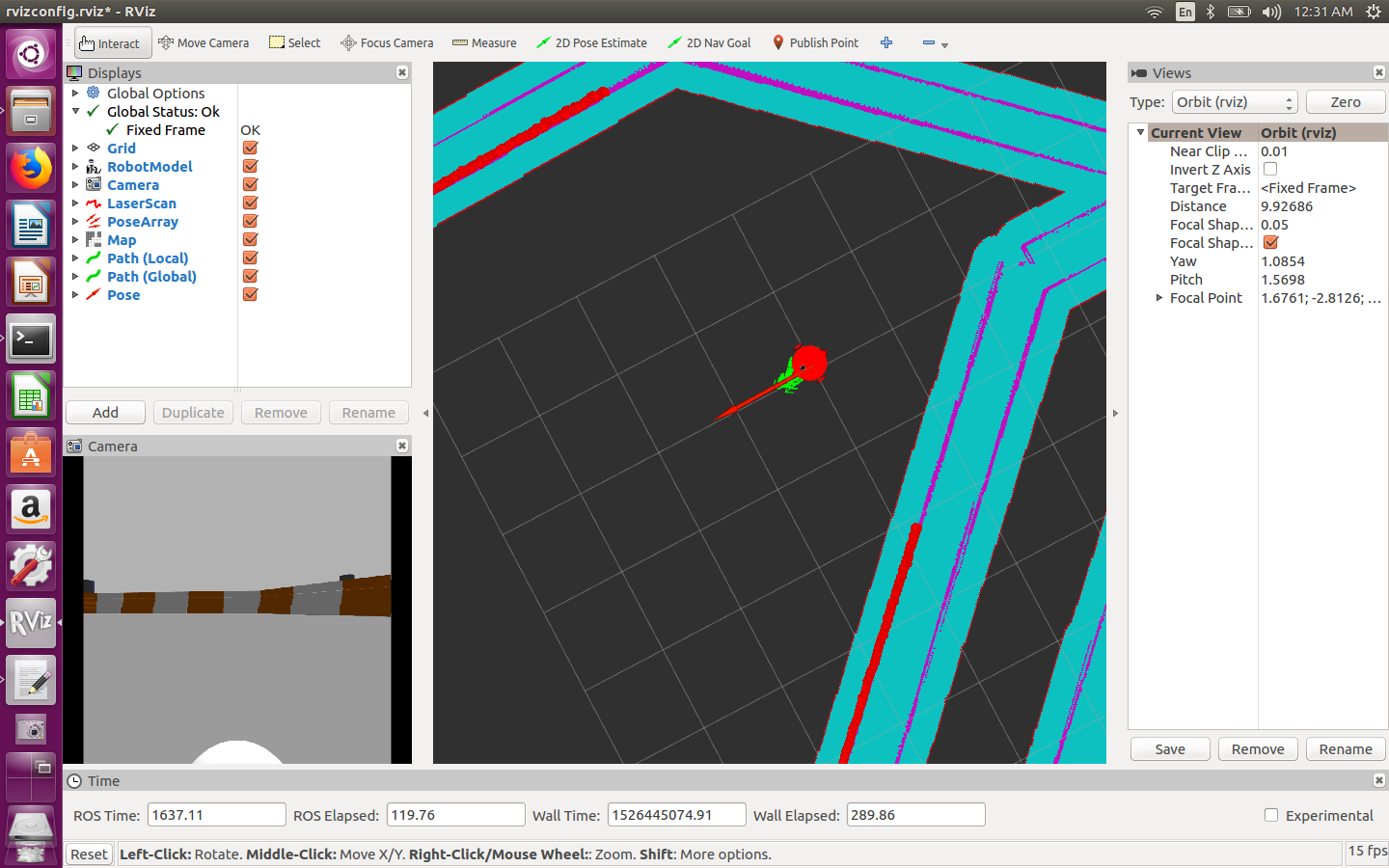
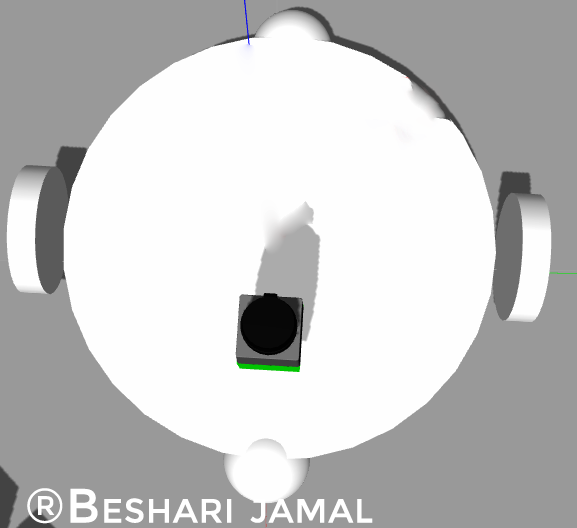
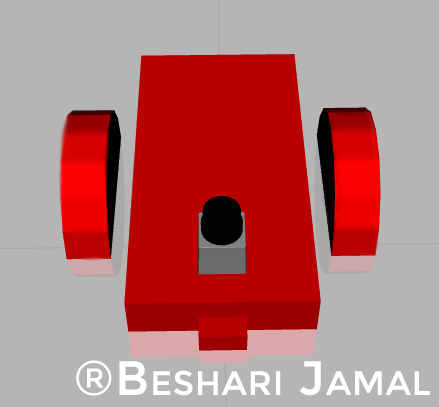
Two robot configurations tested against each other for localization and path planning in a known map using ROS and Gazebo. The circular robot is a custom design; the rectangular model is provided by Udacity.
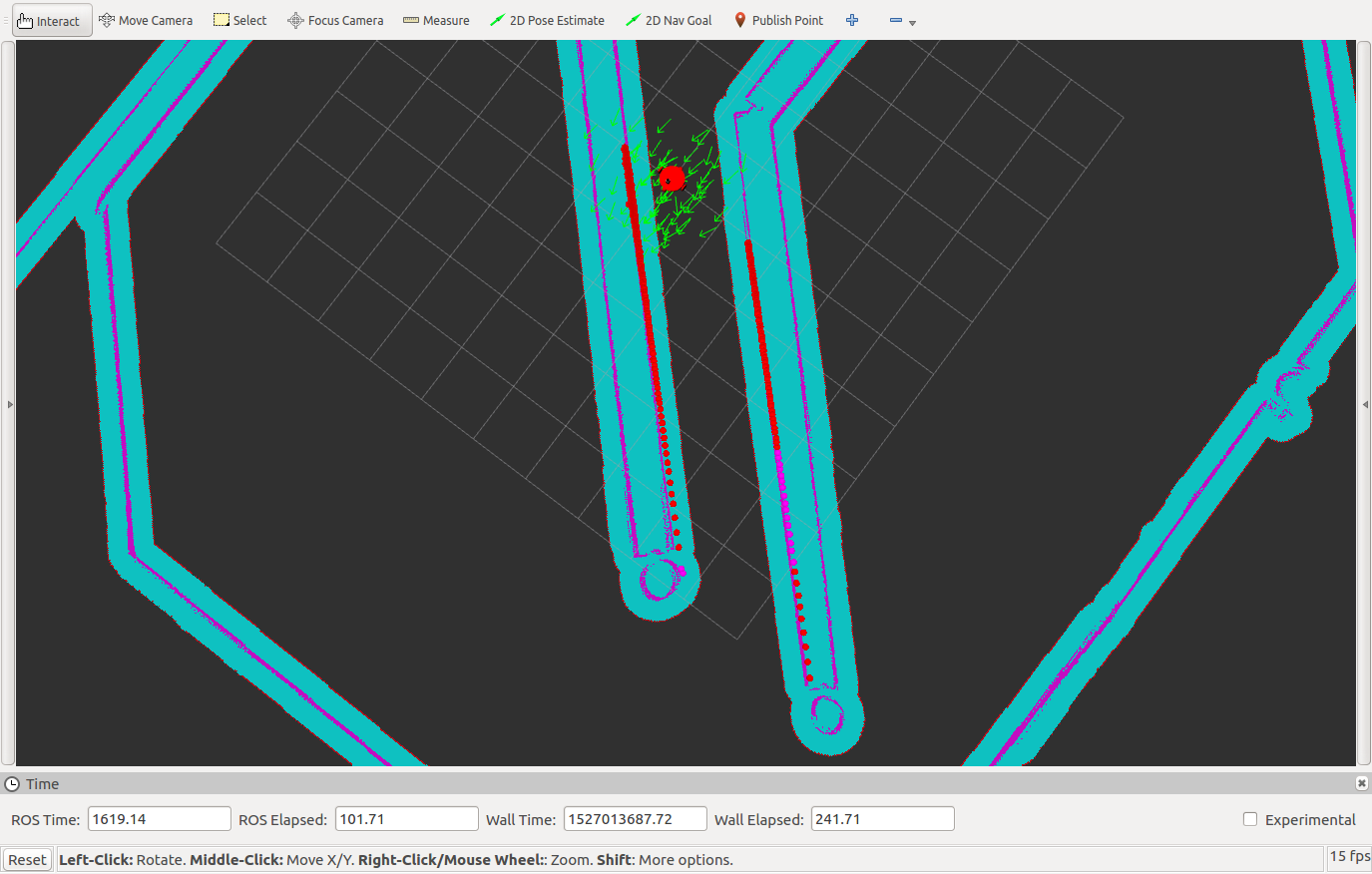
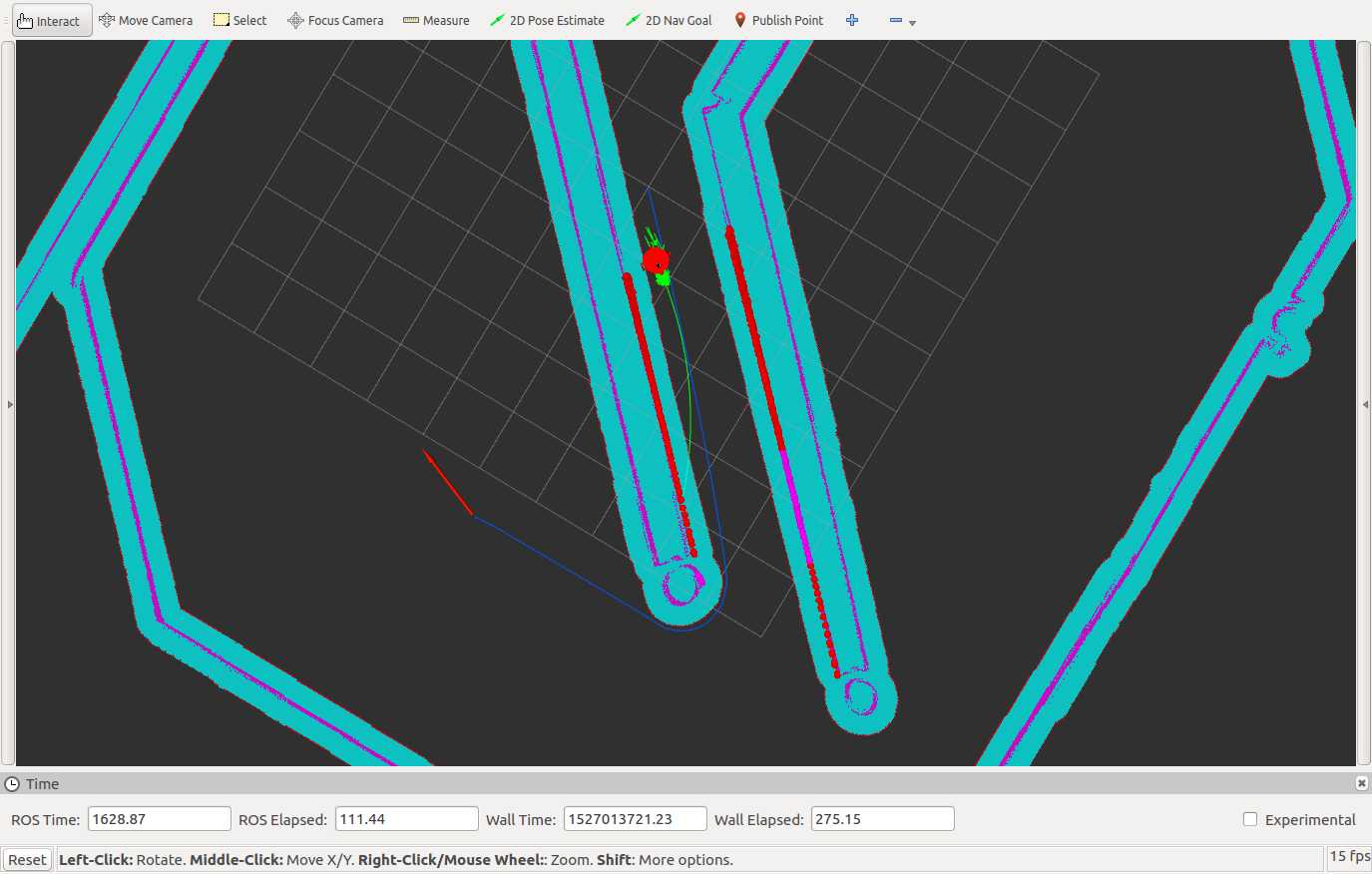
Monte Carlo Localization (AMCL) is used to localize each robot. Particles are generated randomly, weighted against sensor readings, and resampled iteratively until the robot converges on its position in the map.
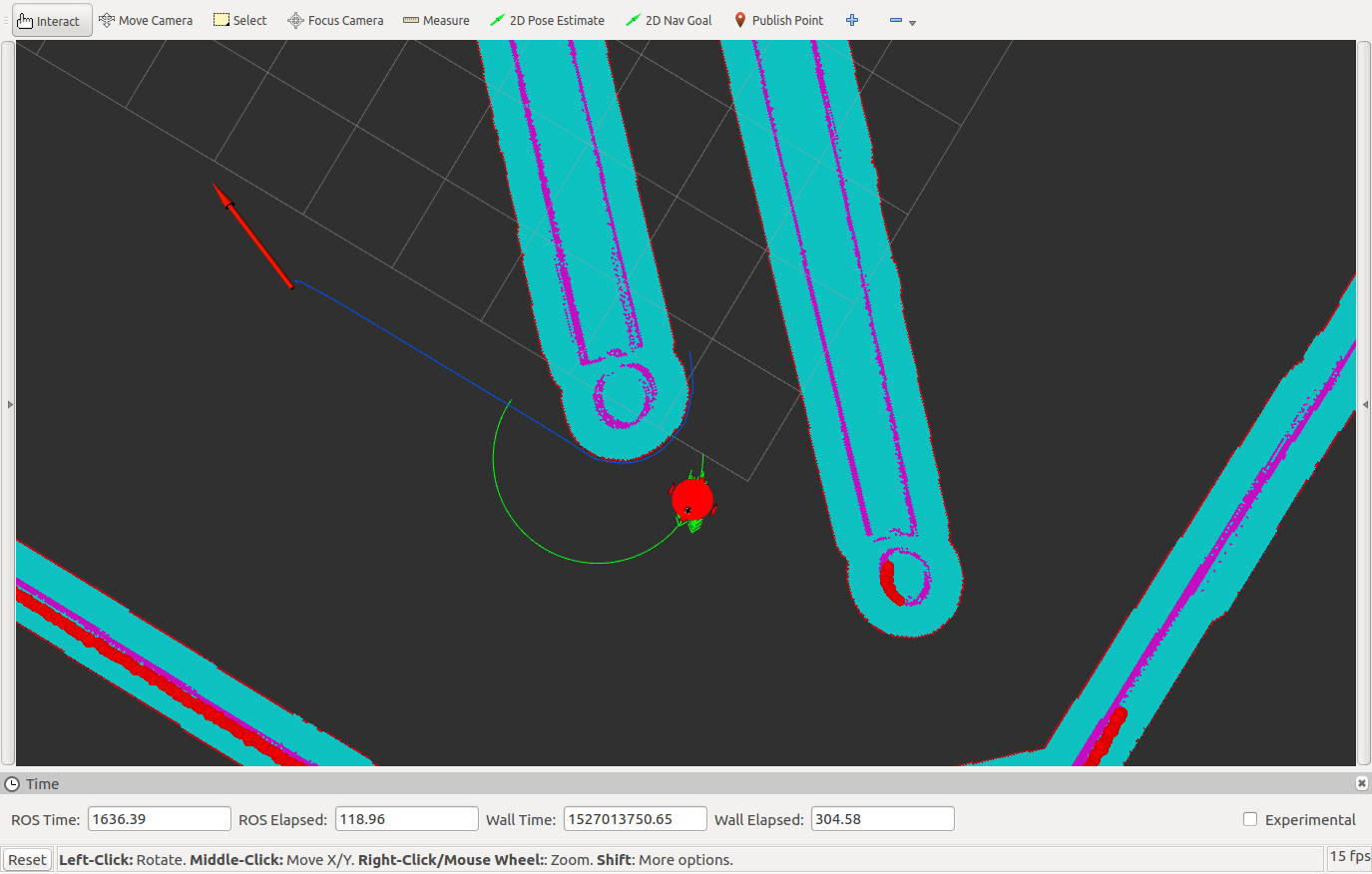
Final localization results for both robots: