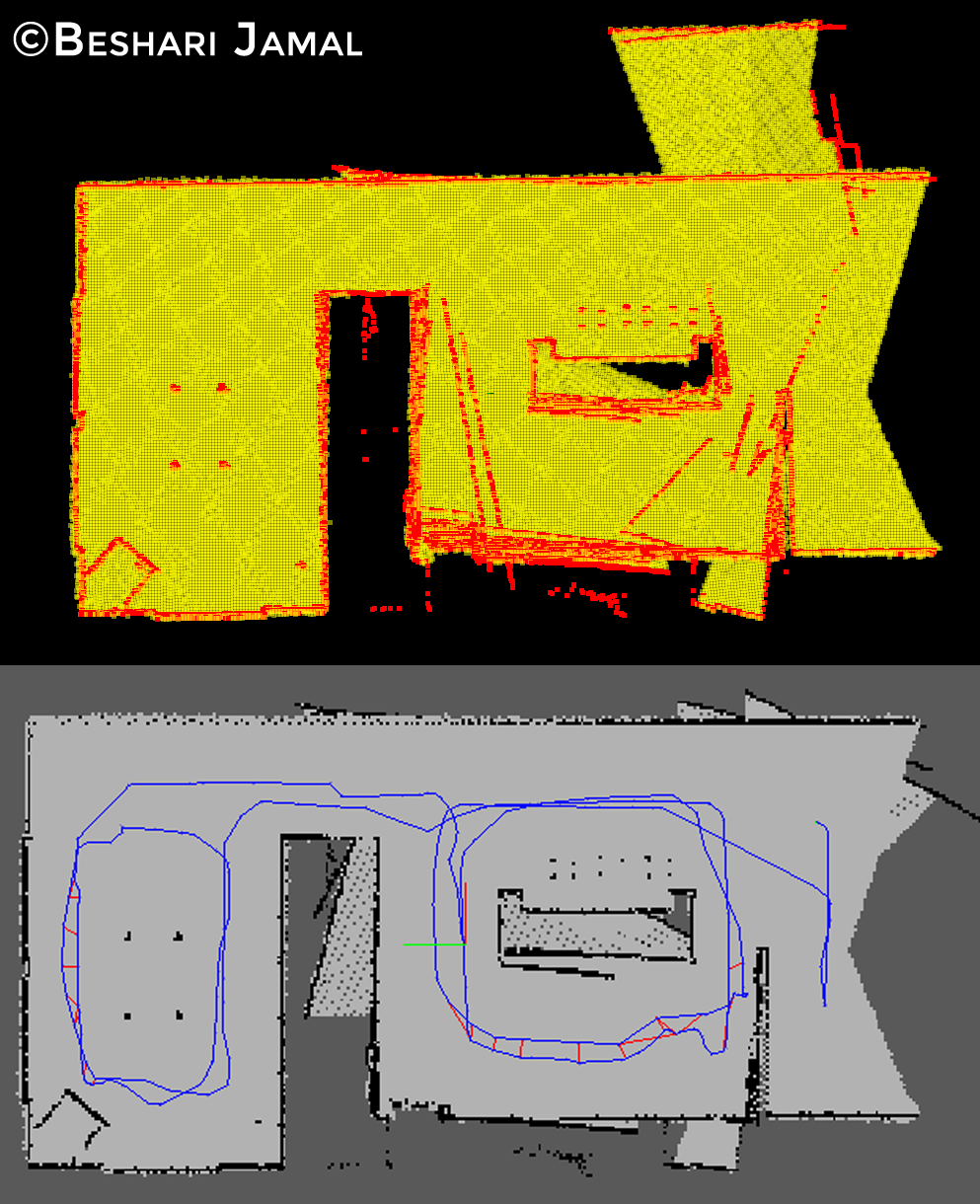
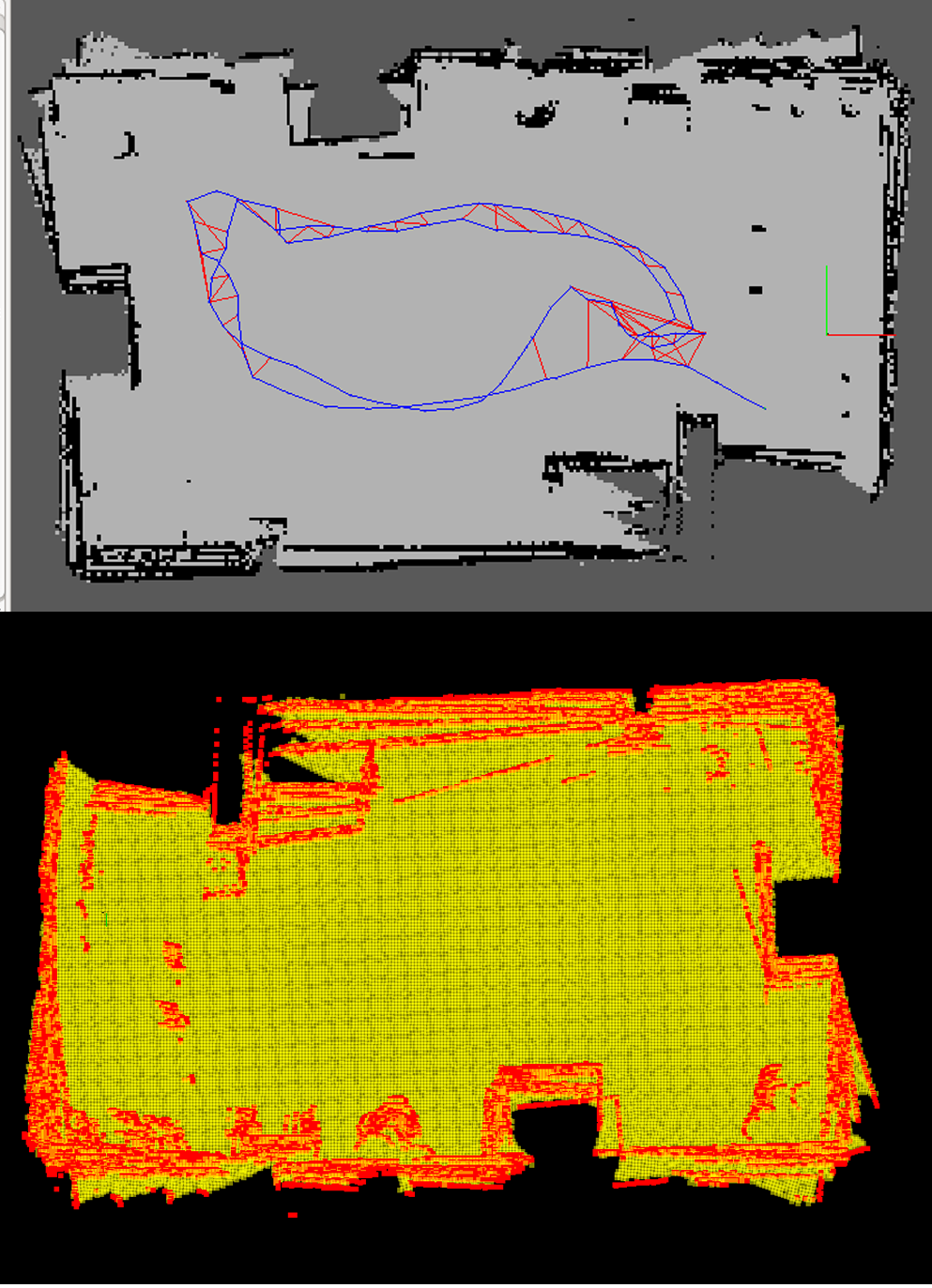
Applied SLAM to enable a robot to build a map and localize itself simultaneously in a kitchen environment. The robot is equipped with a 2D LiDAR and RGB-D camera, simulated in Gazebo and RViz using the RTAB-Map ROS package.


Applied SLAM to enable a robot to build a map and localize itself simultaneously in a kitchen environment. The robot is equipped with a 2D LiDAR and RGB-D camera, simulated in Gazebo and RViz using the RTAB-Map ROS package.