Enabling robots to localize and generate a map of its environment at the same time
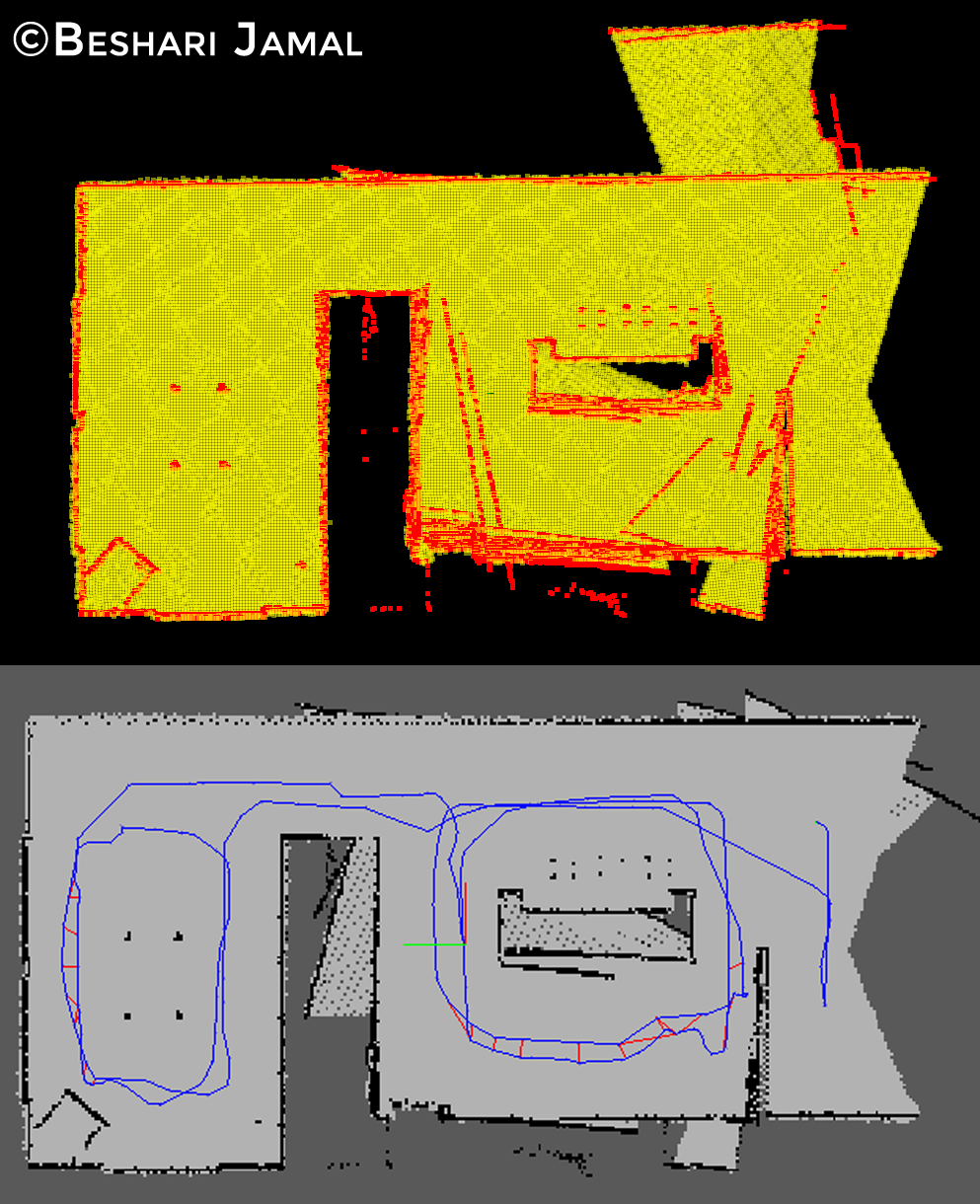
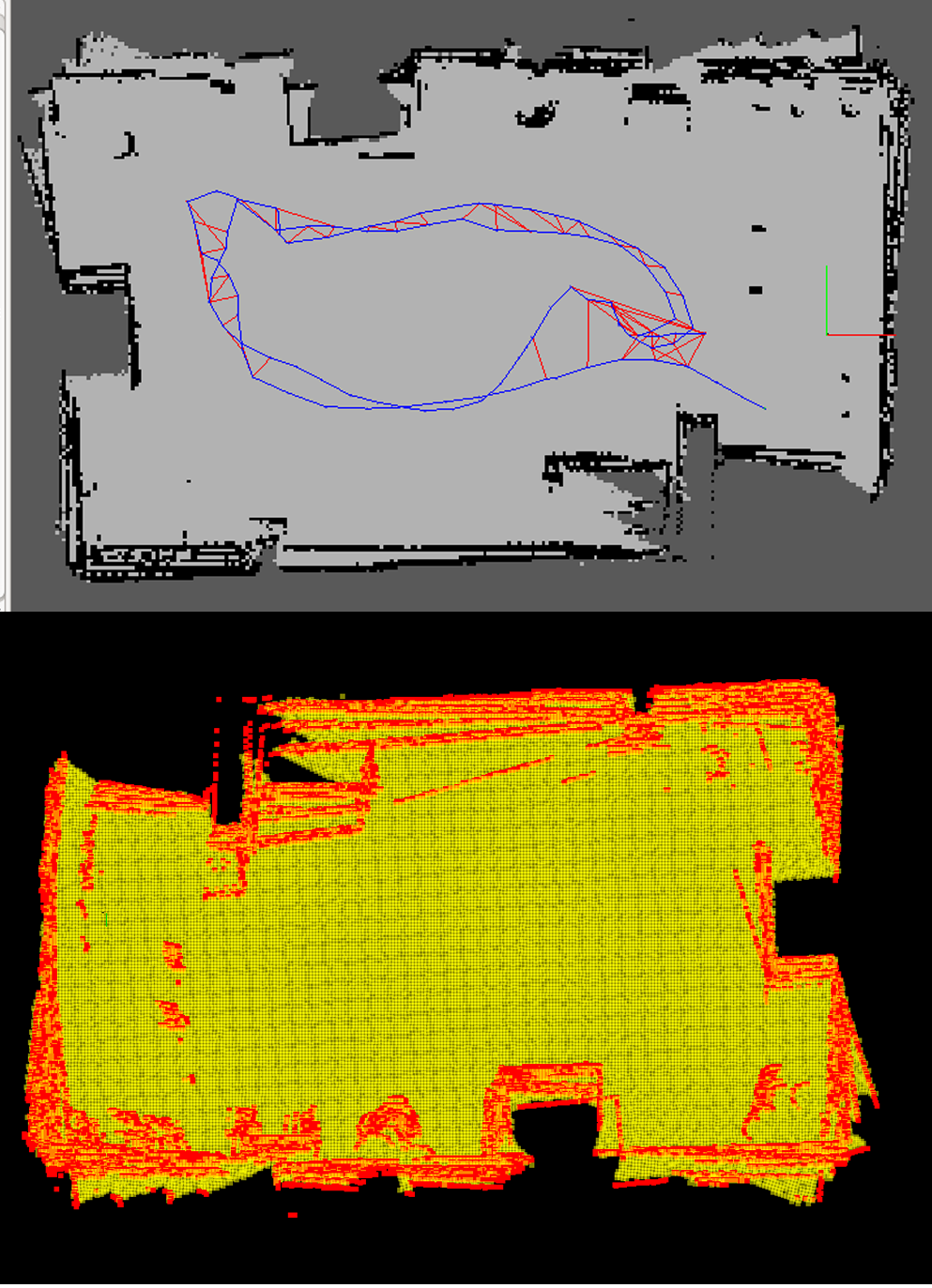
The purpose of this project is to apply simultaneous localization and mapping principles to localize and make the robot able to generate a map of its environment. The robot is equipped with a 2D lidar and RGB-D camera. The robot is moving in a kitchen environment, and the map is generated using RTAB-Map ROS package. The robot is simulated in Gazebo and RViz.
SLAM-map-my-world
Part of the Udacity Robotics Software Engineer Nanodegree SLAM project repository.
A robot moving indoors, mapping the surroundings and localizing itself at the same time
Some of the floor plans and results of the project are shown below: