Contributed to the DexHand project by building the ROS2 MoveIt2 control package for the humanoid hand. Trent Shumay led firmware development; this contribution covered the higher-level motion planning and control stack. While the code was not merged into DexHand1 before the project was sunsetted, it informed the MoveIt2 integration direction for DexHand2.
Follow DexHand for the current project.
Work Done
- Literature review of common robotic hand control approaches: Shadow Hand, Chunk Hand, and Leap Hand
- Built and ran the existing DexHand ROS package
- Created a MoveIt2 package to control the hand through joint state commands
- Cleaned up URDF and controller configuration
- Implemented per-finger chain control with parallel execution support
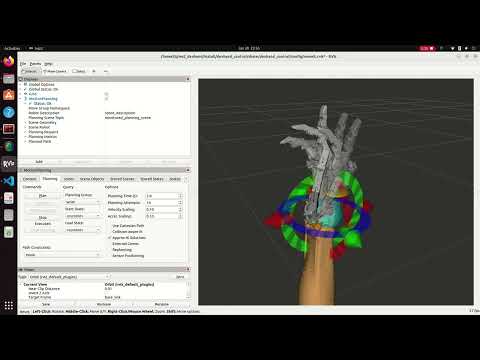
Demo
Click the image to watch the MoveIt2 control demo: