An ongoing project to build a well-documented, modular mobile robot that anyone can replicate. The goal is to close the gap in open-source robotics projects that are often incomplete, undocumented, or difficult to source components for.
The Problem
Most open-source robot projects lack one or more of the following:
- Complete, working software (not just demos)
- Reproducible hardware with sourcing guidance
- Docker containers or environment setup for ROS
- Clear documentation for getting from zero to running
The Approach
Building a mobile robot platform iteratively, starting from basic motor control and working toward full ROS2 autonomy. Each stage is documented and designed to be reproducible.
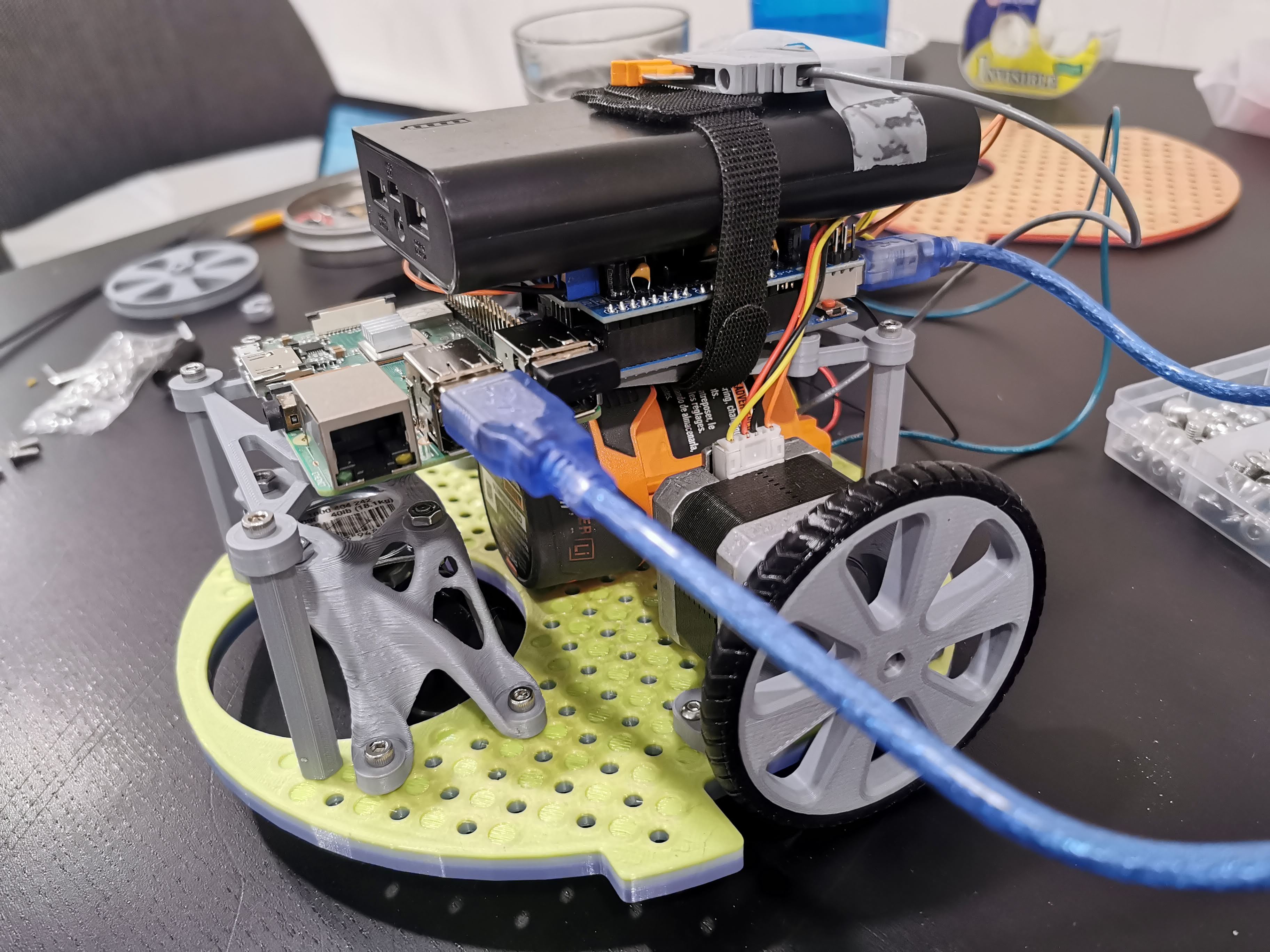
Hardware currently includes DC motors with encoders, an IMU, and a Raspberry Pi running ROS2. The design is modular to allow sensor and compute upgrades without a full rebuild.