At Allied Scientific Pro from September 2018 to October 2021, I worked across mechanical design, robotics R&D, and laser system integration. Projects spanned handheld laser tools, robotic automation, and specialized testing systems deployed to clients including Canadian Parliament, SpaceX, and CNL.
Handheld Laser Cleaning System
Contributed to the mechanical design of a handheld laser cleaning system for precision de-coating in restoration, aerospace, automotive, and nuclear applications.

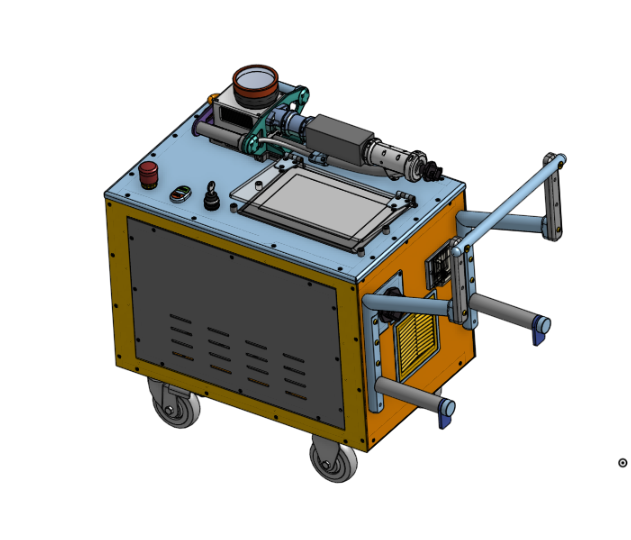
The system replaced labor-intensive manual de-coating methods with a faster, non-contact process suited to delicate and high-value surfaces.
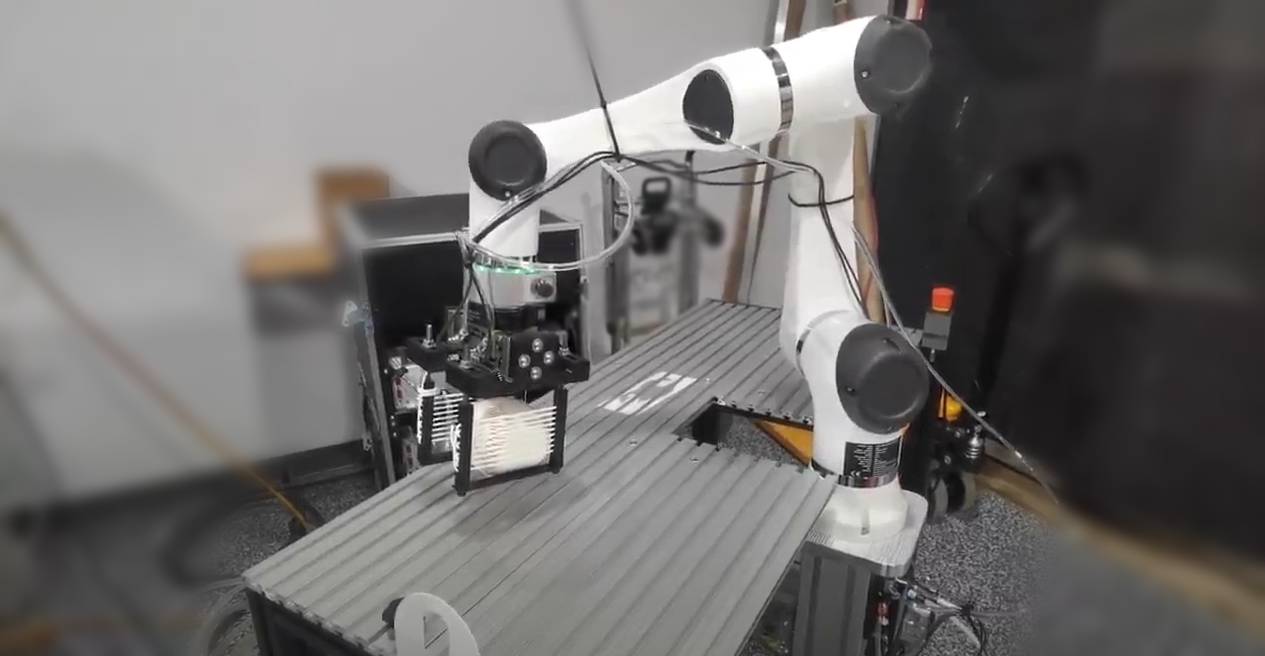
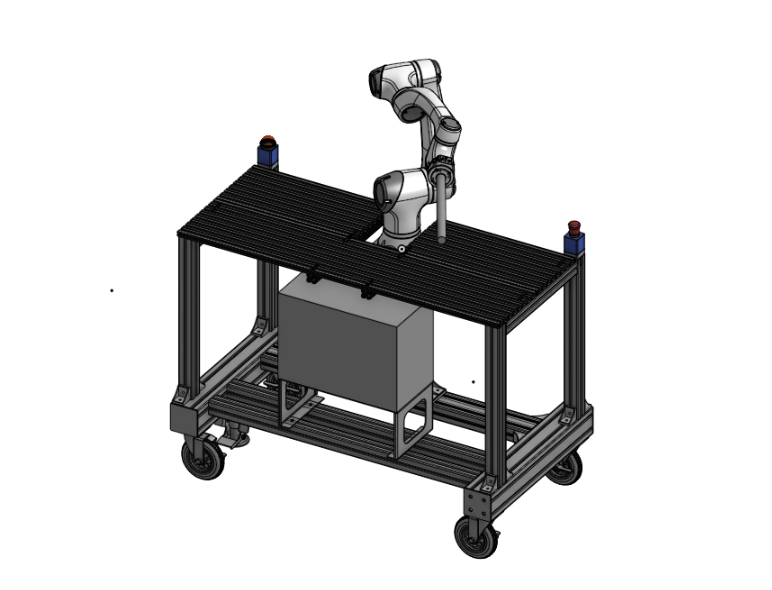
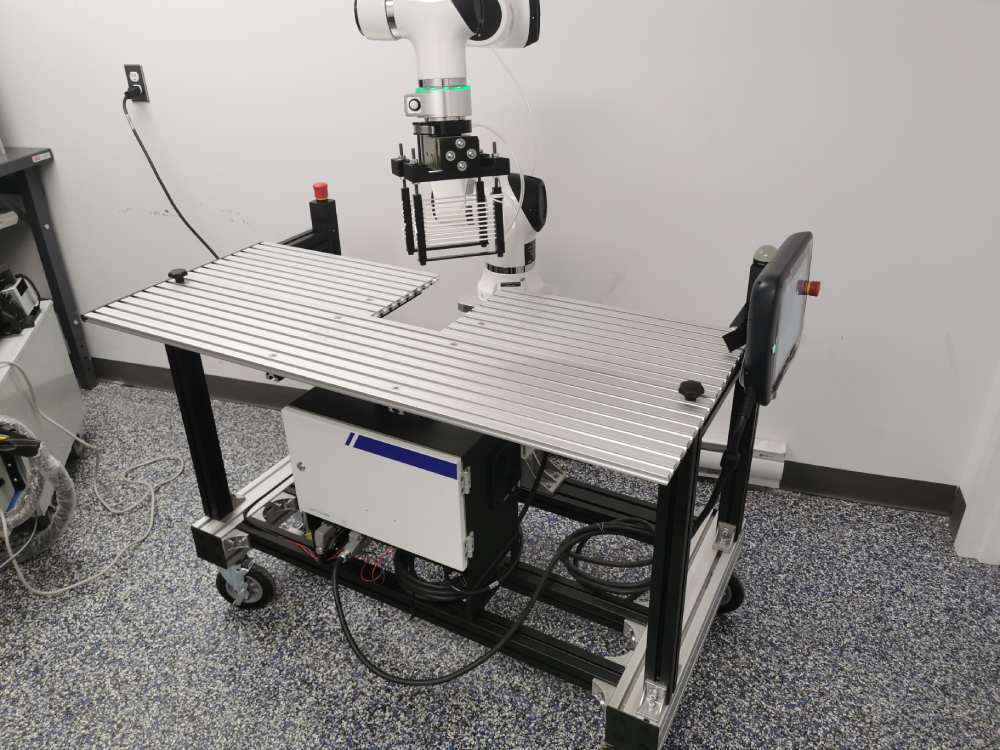
Robotic Laser Automation
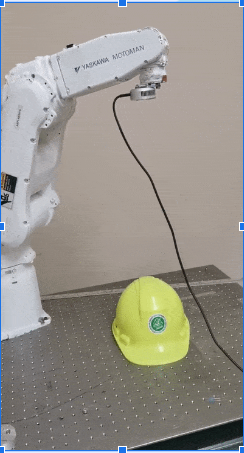
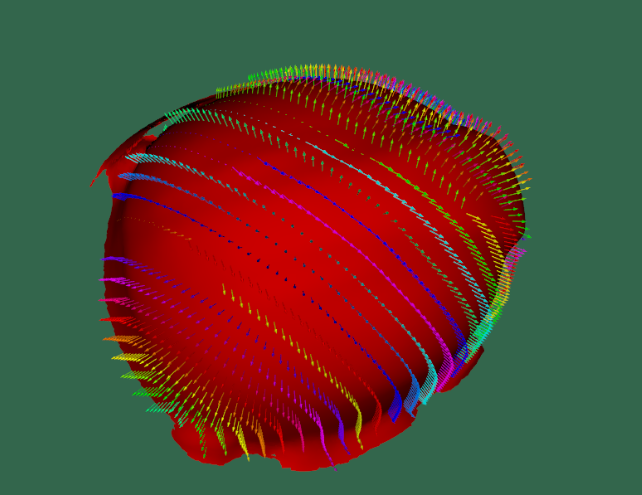
Led the R&D effort to automate the laser cleaning process using a 6-DoF robotic arm and 3D perception. The proof of concept was externally funded and advanced to the prototype phase.

Sourced, installed, and integrated a Fanuc R-2000ic/210F with MoveIt for trajectory planning on arbitrary mesh surfaces using ROS-Industrial (Noether). Built Gazebo simulation environments to validate concepts before transitioning to hardware.

Single Event Effects Testing Station
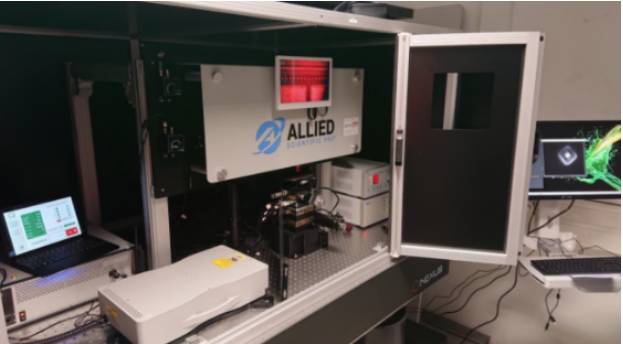
Managed delivery and commissioning of a specialized laser-based testing station for single event effects (SEEs) in electronic components, used to evaluate radiation resilience.

Supporting Engineering Work
Across projects, contributed to full system delivery:
- Developed 3D CAD designs, engineering drawings, and BOMs for laser and robotic arm products
- Integrated robotic arm and pneumatic systems
- Designed, implemented, and tested safety systems
- Performed component testing of 3D sensors with ROS and Linux

Tools and Technologies
- ROS, ROS-Industrial, MoveIt, Gazebo
- Fanuc R-2000ic/210F, Yaskawa Motoman
- Python, C++, Linux
- SolidWorks, OnShape
- 3D sensors, laser systems