Introduction
Ever since my high school days in a robotics competition, the idea of applying physics to create something phenomenal has captivated me. This led to my dream: building a robot. Not just a machine, but a companion that understands the nuances of life.
The Inspiration
Post-layoff, I found myself with time - the most valuable resource. It was the perfect opportunity to bring my dream to life: making my own robot. It was about learning and establishing a testing ground for new ideas.
Early Decisions and Designs
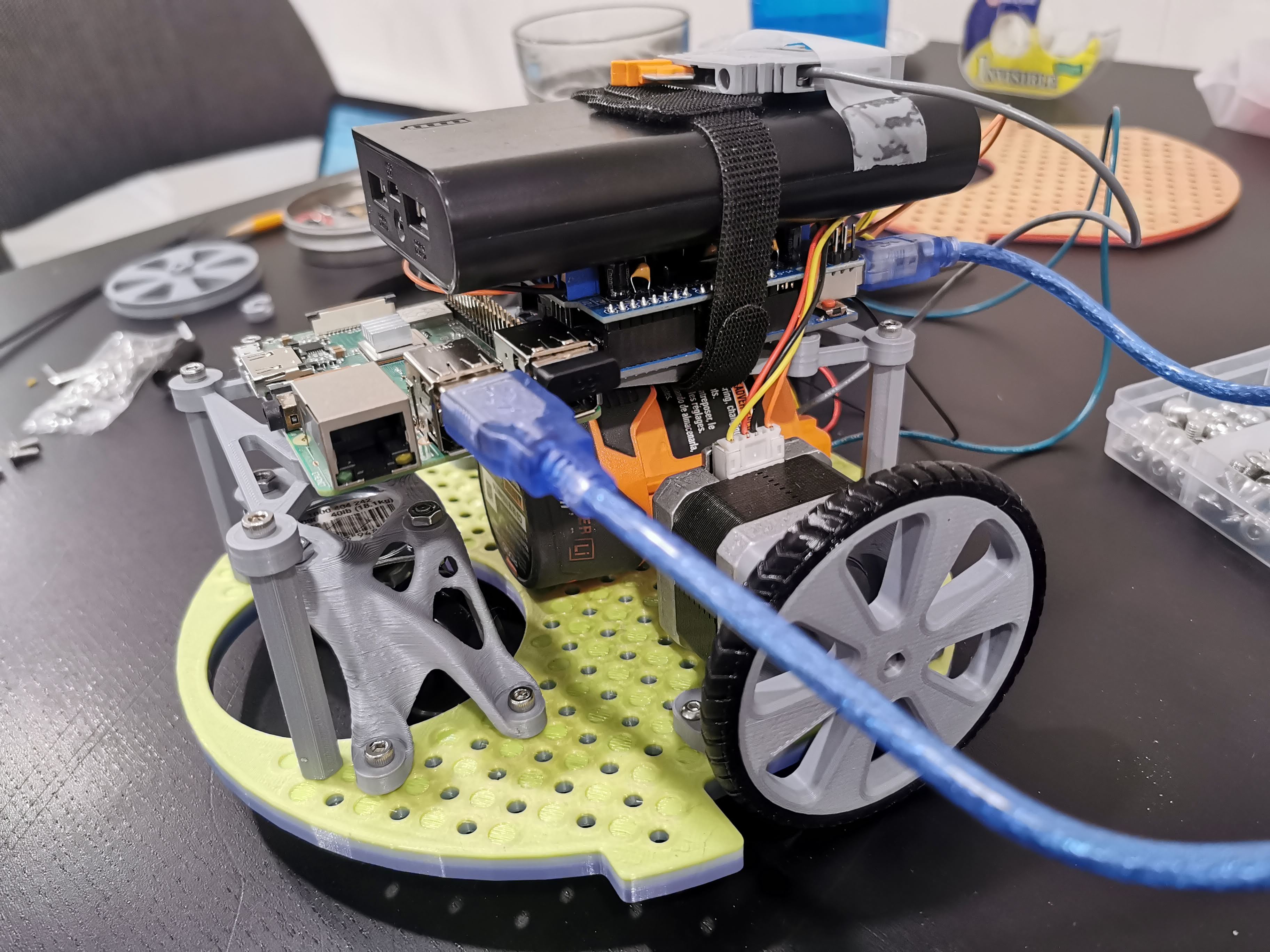
 Starting with an idea to use components around me, hey if I cannot make a robot from a everyday diy components, who am I? With a friend of mine, we set out to test autonomy and motor control. The plan? A drivetrain with open loop stepper motors controlled by an Arduino Uno board, a motor driver hat, and a Raspberry Pi as a master.
Starting with an idea to use components around me, hey if I cannot make a robot from a everyday diy components, who am I? With a friend of mine, we set out to test autonomy and motor control. The plan? A drivetrain with open loop stepper motors controlled by an Arduino Uno board, a motor driver hat, and a Raspberry Pi as a master.
Relevant links
Challenges with Everyday Components
The challenge was immediate. My parts were limited: stepper motors without encoders, no lidar, and an open-loop system. The need for the right equipment became glaringly apparent. However, I was able to teleoperate the robot, and also have it follow a open loop paths that was fascinating for me to see. You can find some of the robot model C++ code here
Realization and Shift in Strategy
I faced a choice: continue with a limiting design or start afresh with a better solution. I chose the latter, focusing on ROS2 - the current industry standard.
Research and Component Selection
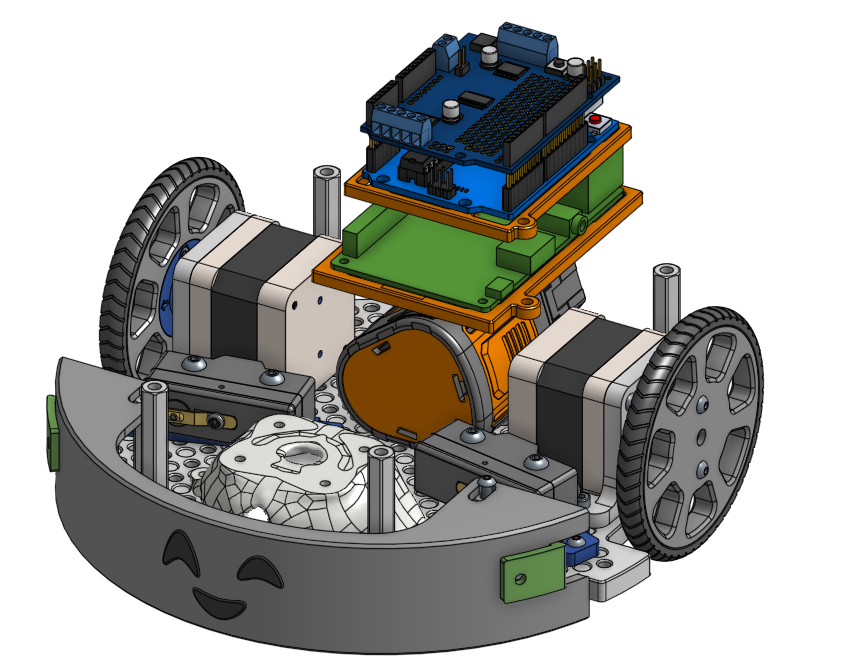
Back to the drawing board, I broke down the robot’s systems. My focus was on seamless integration and minimizing components. I browsed through various projects to understand what worked for others.
Building and Testing the Robot
The second version of my robot is underway. With a modular design in mind, it’s evolving beyond my initial concept. This version boasts a DC motor with an encoder, an IMU, and a power bank.
Reflections and Future Directions
Though still in progress, this journey has been an invaluable learning curve in robotics and mechatronics. It’s a stepping stone to many more modular robot designs, aiming to empower makers.
Conclusion
This experience has taught me that picking the right components from the start is very important, and gets more expensive as the product advances in development.